自动驾驶的感知路线正在不可避免的迎来激光雷达时代。
近日,在美国的佛罗里达州,一辆Model Y(配置|询价)工程测试车,头顶Luminar激光雷达测试,被路人拍到,引起争议。一时间,坚持走纯视觉路线,不要雷达,长期鄙视激光雷达的马斯克与特斯拉再次“火”到出圈。
然而热闹归热闹,众说纷纭背后,坚持不要雷达的特斯拉,也开始测试激光雷达,充分显示了一个事实——自动驾驶的感知路线正在不可避免的迎来激光雷达时代。率先开辟激光雷达道路的车企,无疑在这一波竞争中走到了前列。

纯视觉路线,其实不像听起来那么不靠谱
长期以来,激光雷达以其价格高昂,虽然精度高,但高成本使其无法量产上车而出名。也正是因为这样的原因,为了抢先推动自动驾驶上路,特斯拉一直以来都抵制激光雷达上车,并以摄像头+毫米波雷达+强决策算法相结合,打造出低成本就能与激光雷达匹敌的自动驾驶感知能力。
虽然特斯拉自己标榜自身的低成本高感知技术成功实现。但从去年以来的一系列事故,却让特斯拉的低成本感知路线屡屡受挫,这让马斯克也不得不为陷入危机的自动驾驶寻找新的出路。
就在4月份,马斯克终于为焦头烂额的自动驾驶方案寻找到了新路线,一句“Pure vision, no radar”,让纯视觉路线全面进入实践阶段。也引发了行业的全面热议。
然而马斯克使用纯视觉路线的思路其实不难理解。在激光雷达成本过高,无法上车的基本前提下。当前的自动驾驶感知器件主要是摄像头和毫米波雷达。而民用级别的毫米波雷达,普遍存在信噪比低、识别率低的问题。
通俗来说就是毫米波雷达扫过去之后,虽然能够发现各类障碍物,但却很难识别哪些是道路上需要躲避的人和车辆,哪些是路边不影响开车的路标,甚至哪些是可以直接开过去的井盖。
这就导致了以毫米波雷达做决策依据时,会有大量不需要规避的“噪音”信号,被当做障碍物保存下来,使得自动驾驶汽车像神经质一样,遇到井盖也会急踩刹车。
为了解决这个自动假设“神经质”的问题,包括特斯拉在内的主流自动驾驶算法,在融合摄像头和毫米波雷达的信息做决策时,往往在优先级上选择相信摄像头的判断,优先根据摄像头的结果做决策,采取行动。在这样的算法方案下,毫米波雷达的感知效应其实基本没有发挥出来。
既然雷达的作用基本无法发挥,那么拿掉雷达,装更多的摄像头,把摄像头的功能做的更加强大的纯视觉路线,无疑是一个非常合理的发展方向。
然而,这样的纯视觉路线却有一个前提,那就是识别率更强大的雷达无法使用,只能依赖强化摄像头提升感知。
一旦感知能力远强于毫米波雷达的激光雷达能够以合理的成本上车,一切就会变得完全不同。

激光雷达:改变形势的关键牌
就在马斯克发表“谁用激光雷达谁就是傻子”言论的2019年,车用激光雷达还是一种非常昂贵的部件。类型以机械式为主,价格动辄20000美元,几乎快赶上半辆车的价钱。任何一辆量产车型装载这样的配件,无疑都会极大的拉低商业价值。对急于快速树立高科技形象并对盈利有要求的特斯拉来说,这样的技术路线,必然不适合自己的发展方向。然而,技术的进步常常超越人类的预期。到2021年,固态、半固态激光雷达技术迅速发展,激光雷达成本迅速降低。
车载激光雷达价格的迅速下行,真正使得激光雷达飞入寻常百姓家。与前面提及的毫米波雷达不同。激光雷达由于波长远小于毫米波,不但可以轻松实现远高于毫米波雷达的分别率,而且可以三维成像。简单来说,毫米波雷达的分辨率,只能识别出障碍物的存在,基本分辨不出障碍物是什么,以及在三维空间的位置。在成像显示上,只是蔓延在平面上的一个个点。而激光雷达完全不同,不但能够识别物体,还能在三维空间显现出物体的轮廓。再也不会出现毫米波雷达,把井盖当障碍物,把侧翻的白色卡车当天上的白云一类的失误。
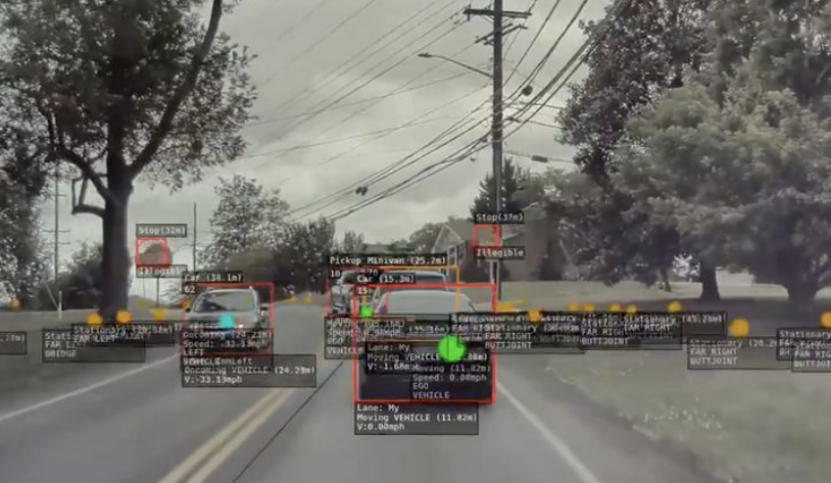 图:摄像头识别(红框)叠加的毫米波雷达识别(点状)
图:摄像头识别(红框)叠加的毫米波雷达识别(点状)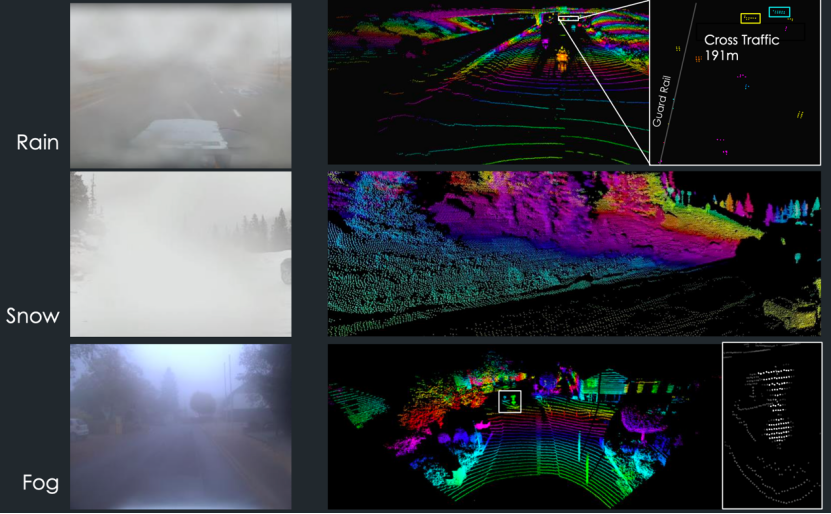 图:激光雷达在各种场景下的点云成像
图:激光雷达在各种场景下的点云成像当具有高识别率的激光雷达与摄像头的视觉识别进行融合,自动驾驶汽车感知能力无疑将大幅提升。完全可以避免只根据视觉感知结论。实在是居家旅行,自动驾驶的必备神器。
以特斯拉正在测试的Luminar激光雷达为例。作为激光雷达行业的先驱者之一,Luminar的激光雷达为采用2D扫描模式的半固态MEMS激光雷达,采用1550nm光纤激光器作为光源,InGaAs的APD作为探测器。相较于常规激光雷达,1550nm光源由于对人眼无害,可以做到大功率使用,Luminar激光雷达的分辨率可以达到300线以上,探测距离达到500米。充分满足低成本、可靠、可量产的上车需求。
正是由于如此超预期的产品表现,刚刚取消毫米波雷达,宣布进入纯视觉路线的特斯拉,也不得不开启测试,直呼真香。

国内车企:激光雷达的实践者们
如果说依靠强大算法优势,推动纯视觉路线的特斯拉虽然合理,但仍显激进。那么,国内企业对自动驾驶的探索则要稳健而理性的多。
如华为虽多次对外强调“不造车”,可它对于自动驾驶技术的秘密研究早在2018年就已经开始了,不久前,华为也宣布将与3个车企合作打造3个汽车自品牌;而与华为合作的极狐激光也采用了雷达;2021年1月,蔚来在“2021 NIO DAY”上宣布其第一款智能纯电轿车ET7(配置|询价)将添加激光雷达;同期,同属造车新势力三强的小鹏汽车也向外界宣布将开启使用小鹏定制版车规级激光雷达。在传统车企方面,今年3月,上汽集团发布自身全新科技品牌R-TECH高能智慧体,宣布与Luminar激光雷达的合作;而在4月份,北汽旗下的几乎品牌也宣布搭载华为的激光雷达。激光雷达路线成为自主车企抢滩智能网联与自动驾驶的重要一环。
由于中国拥有全球最丰富、最复杂的交通场景,长期以来,国内环境对感知和算法的要求一直高于国外。正是基于这样复杂的现实条件,感知层的优化成为了众多造车新势力打造智能网联和自动价值的重中之重。
而在确保自动驾驶安全性方面,上汽就为行业提供了一个很好的实践。上汽打造的全栈自研的高阶智驾方案PP-CEM™,构建全天候、全场景、超视矩、多维度的“六重融合式感知体系”,以充分冗余的多重感知器件,为用户的出行保驾护航。
在六重融合的感知体系中,上汽不仅使用了传统上常用的视觉摄像头,毫米波雷达、高精地图,还引入了4D成像雷达、5G V2X以及激光雷达等多个感知工具。这其中激光雷达的作用至关重要。主动发出感知外界的多线束、超短波激光束,不仅能够高精度还原道路场景,还拥有摄像头等难以具备的、外界环境影响小、恶劣条件工作更稳定的优势。
而为了保证ES33的“天眼”——激光雷达,能够与其他感知器件协同配合,最大程度辅助自动驾驶决策。上汽R-TECH还为这套感知系统搭配了“最强大脑”——英伟达 Orin 计算平台。这款专为车载设计的计算平台,拥有500至1000+TOPS的超强算力,配合上汽全栈自研的超级环境模型算法,可以实现感知即融合,充分综合ES33多维度、全方位感知系统的信息,帮助人和车做出准确的判断、预测和规划,提升智能驾驶的安全性。
从目前的发展来看,随着技术和成本的双重进步,争论多年的智能驾驶路线分歧,正在向激光雷达路线方向倾斜。与传统汽车对海外汽车技术与产品亦步亦趋的跟随不同,凭借稳健而理性的持续研发,中国自主品牌汽车正在越来越多的积累出自身的优势,并成为行业的引领性力量。下一步,曾经领先的特斯拉很可能要摸着中国车企的石头过河了。
郑重声明:本文版权归原作者所有,转载文章仅为传播更多信息之目的,如作者信息标记有误,请第一时间联系我们修改或删除,多谢。



